Maquinados Automáticos Computarizados (CNC)
Dispositivo capaz de controlar el movimiento de uno o varios órganos de la máquina de forma automática a partir de los números y símbolos que constituyen el programa de trabajo.
Este programa controla o automatiza las siguientes funciones:
Los movimientos de los carros
Las velocidades de posesión y mecanizado.
Los cambios de herramientas
Los cambios de piezas.
Las condiciones de funcionamiento (refrigeración, lubricación, etc.).

Clasificación
1.Control numérico "punto a punto"
Este sistema controla el posicionamiento de la herramienta en los sucesivos puntos donde deben efectuarse una o varias operaciones de maquinado. La trayectoria seguida para pasar de un punto al siguiente no tiene importancia, pues las funciones de posicionamiento y de maquinado son distintas.
2.Control numérico "paraxial"
Con este sistema es posible controlar, además de la posición del órgano móvil, la trayectoria seguida por el mismo según la dirección de algunos de los ejes coordenados. Esta posibilidad se ofrece, generalmente como una opción adaptable a un sistema de posición punto a punto.
3.Control numérico "continúo"
Los movimientos del órgano móvil son controlados en todo momento, de manera que las posiciones sucesivas del mismo deben corresponder siempre a la trayectoria preestablecida.
Se consigue este resultado relacionando entre si los movimientos elementales según los distintos ejes coordenados, de modo que estos movimientos elementales sigan cada uno una ley prescrita por una trayectoria común.
Estructura de los programas de control numérico
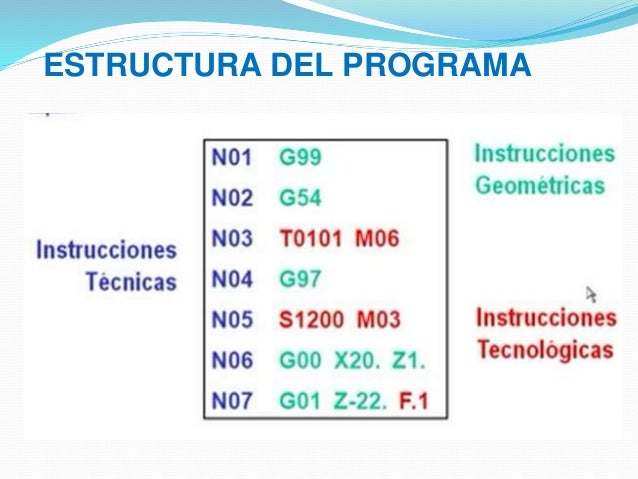
División de bloques
1.Geométrica
-Dimensiones de la pieza
-Acabado superficial de la pieza
-Tolerancias
-Dimensiones de la herramienta
-Longitud de los desplazamientos
X,Y,Z: Direcciones Dimensionales.
G: Funciones principales.
2.Tecnológica
-Velocidad de avance
-Características del material de la pieza
-Tipo de refrigerante
-Modo de funcionamiento de la máquina herramienta
-Dispositivo de sujeción
M: Funciones auxiliares.
F,S,T: Ordenes tecnológicas.
3.Movimiento
-Orden secuencial de las operaciones
-Tipo de función de desplazamiento
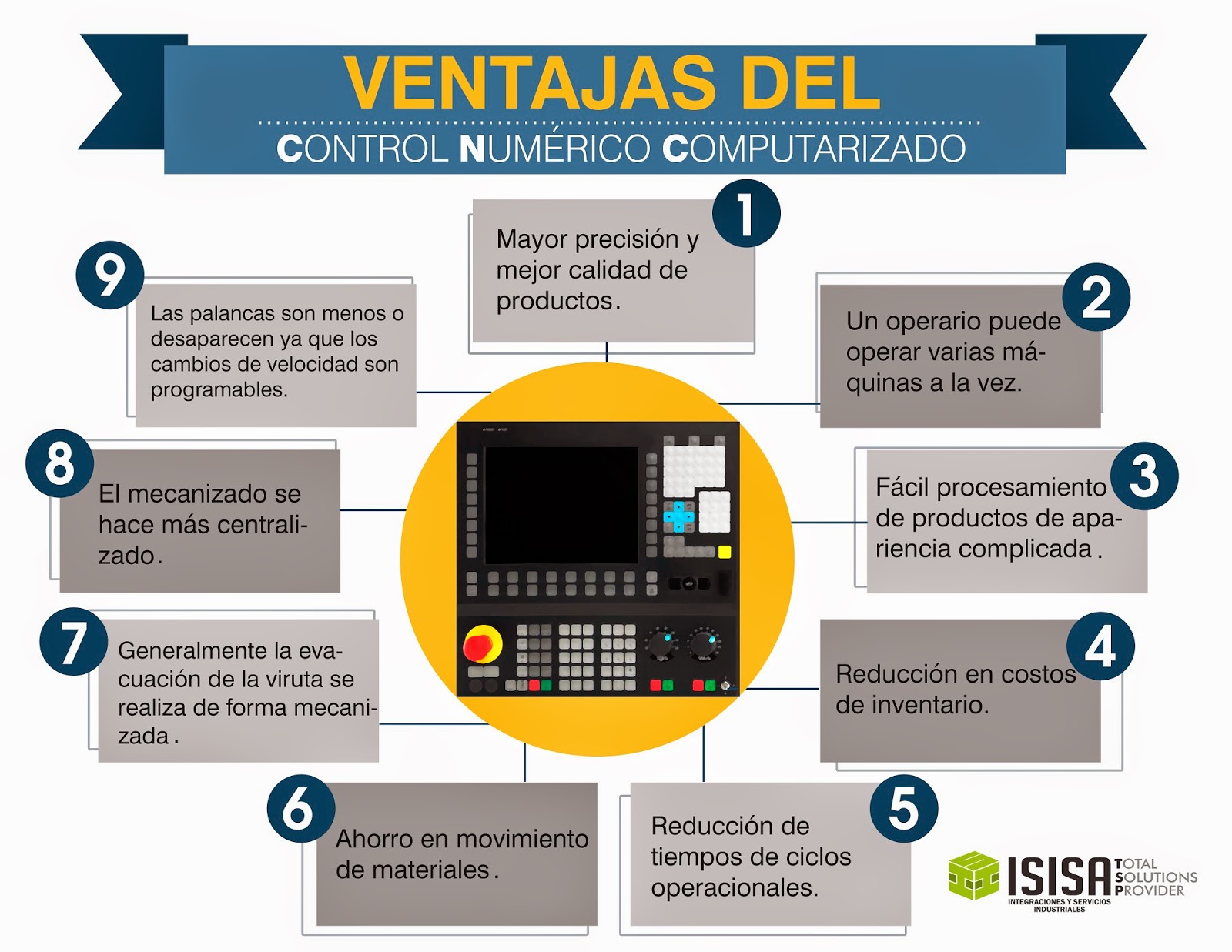
Ventajas
Funciones principales utilizadas en la máquina .
Funciones preparatorias
G00 - Desplazamiento lineal sin erosión a máxima velocidad G00 Xx Yy
G01 - Interpolación lineal con erosión G00 Xx Yy
G02 - Interpolación circular en sentido horario G02 Xx Yy Ii Ji
Los valores de Ii, Jj siempre se dan el sistema incremental o relativo.
G03 - Interpolación circular en sentido antihorario G03 Xx Yy Ii Jj G90 - Sistema absoluto
G21 - Define ciclo de programa inicial
Funciones auxiliares
M02 Fin de programa
M03 Giro del husillo sentido horario
M05 Paro del husillo
M06 Cambio de la herramienta
M08 Refrigerante “ON” (Enciende)
M09 Refrigerante “OFF” (Apaga)
Sistemas coordenados en control numérico.
EL SISTEMA COORDENADO DE LA MAQUINA
(El origen de este sistema se conoce como cero maquina M).
El sistema coordenado de la maquina se establece cuando la maquina se enciende y la herramienta es llevada al punto de referencia. Una vez que el sistema de referencia de la maquina se ha establecido, este no puede ser cambiado por definición de un sistema local o de trabajo. La única posibilidad para que el sistema sea borrado es que la maquina sea apagada.
EL SISTEMA COORDENADO DE REFERENCIA
(El origen de este sistema se conoce como punto de referencia R).
Cuando la maquina se enciende la operación de llevar la maquina a su punto de referencia es la primera tarea que debe ejecutarse. Una vez que este punto es alcanzado, el sistema de la maquina es establecido.

EL SITEMA COORDENADO DE TRABAJO
(El origen de este sistema se conoce como cero-pieza W).
El origen de este sistema se define en un punto de utilidad para la programación de la geometría de la pieza. El sistema coordenado de trabajo puede ser establecido utilizando cualesquiera de los siguientes métodos:
Utilizando la función G92
Utilizando las funciones G54 - G59
Sistema de coordenadas
Programación absoluta = G90
En el caso dimensional absolutas, la referencia siempre se considera el punto origen del sistema coordenado definido.

Programación incremental = G91. En caso de las dimensiones incrementales, la referencia se considera la posición del último punto definido.
