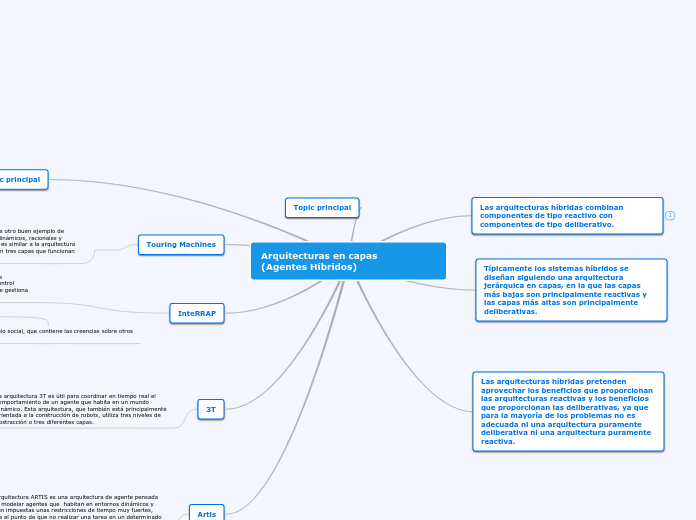
Arquitecturas en capas (Agentes Híbridos)
Las arquitecturas híbridas combinan componentes de tipo reactivo con componentes de tipo deliberativo.
Típicamente los sistemas híbridos se diseñan siguiendo una arquitectura jerárquica en capas, en la que las capas más bajas son principalmente reactivas y las capas más altas son principalmente deliberativas.
Las arquitecturas híbridas pretenden aprovechar los beneficios que proporcionan las arquitecturas reactivas y los beneficios que proporcionan las deliberativas, ya que para la mayoría de los problemas no es adecuada ni una arquitectura puramente deliberativa ni una arquitectura puramente reactiva.
Topic principal
Topic principal
Touring Machines
La arquitectura Touring Machines es otro buen ejemplo de arquitectura híbrida para agentes dinámicos, racionales y autónomos. Esta arquitectura, que es similar a la arquitectura subsumpción de Brooks, consiste en tres capas que funcionan concurrentemente.
InteRRAP
Un agente InteRRaP está compuesto de una Base de Conocimiento que está asociada a una Unidad de Control situada sobre un Componente Percepción-Acción que gestiona las comunicaciones de bajo nivel
• Un modelo mental, que contiene las creencias del agente sobre si mismo.
• Un modelo social, que contiene las creencias sobre otros agentes.
3T
La arquitectura 3T es útil para coordinar en tiempo real el comportamiento de un agente que habita en un mundo dinámico. Esta arquitectura, que también está principalmente orientada a la construcción de robots, utiliza tres niveles de abstracción o tres diferentes capas.
• Un conjunto dinámicamente reprogramable de habilidades reactivas que son coordinadas por un coordinador.
• Un secuenciador, que activa y desactiva conjuntos de habilidades para crear redes que cambien el estado del mundo y lleven a cabo tareas específicas.
• Un planificador deliberativo que pueda realizar razonamientos complejos sobre las metas, los recursos y las restricciones de tiempo.
Artis
La arquitectura ARTIS es una arquitectura de agente pensada para modelar agentes que habitan en entornos dinámicos y tienen impuestas unas restricciones de tiempo muy fuertes, hasta el punto de que no realizar una tarea en un determinado tiempo puede llevar a efectos catastróficos. Un agente ARTIS es autónomo, reactivo, proactivo y tiene continuidad temporal.
• Un conjunto de sensores y efectores que permiten interaccionar con el entorno.
• Un módulo de control que es responsable de la ejecución en tiempo real de cada componente del agente.
• Un nivel reactivo que asegura una respuesta ante cualquier evento crítico del entorno.
• Un servidor inteligente, que se utiliza para construir respuestas de alta calidad